








RoboDK
RoboDK - Programmierung und Simulation von Industrierobotern
RoboDK ist ein leistungsfähiger und kostengünstiger Simulator für Industrieroboter und Roboterprogrammierung.
Mit der RoboDK-Simulationssoftware können Sie das Beste aus Ihrem Roboter herausholen.
![]() Mit der intuitiven Benutzeroberfläche von RoboDK sind keine Programmierkenntnisse erforderlich
Mit der intuitiven Benutzeroberfläche von RoboDK sind keine Programmierkenntnisse erforderlich![]() Sie können jeden Roboter mit nur wenigen Klicks offline programmieren
Sie können jeden Roboter mit nur wenigen Klicks offline programmieren![]() RoboDK verfügt über eine umfangreiche Bibliothek mit über 500 Roboterarmen
RoboDK verfügt über eine umfangreiche Bibliothek mit über 500 Roboterarmen

Simulieren und programmieren Sie Ihre Roboter in 5 einfachen Schritten
Offline Programmierung
Unter Offline-Programmierung (oder Off-Line-Programmierung) versteht man die Programmierung von Robotern außerhalb der Produktionsumgebung. Durch die Offline-Programmierung werden Produktionsausfallzeiten, die durch die Werkstattprogrammierung verursacht werden, vermieden.
Die Simulation und Offline-Programmierung ermöglicht mehrere Szenarien einer Roboterarbeitszelle optimal auszuwerten, bevor die Produktionszelle eingerichtet wird. Fehler, die häufig bei der Einrichtung einer Produktionszelle aufkommen, können dadurch rechtzeitig vorhergesagt werden.
1. Wählen Sie Ihren Roboter aus
Sie erhalten automatisch Zugang zur umfangreichen RoboDK-Roboter-Bibliothek. Die RoboDK-Bibliothek umfasst:
- Über 500 Industrieroboterarme von 50 verschiedenen Roboterherstellern, einschließlich: ABB, Fanuc, KUKA, Yaskawa/Motoman, Universal Robots, etc.
- Externe Achsen wie 1-, 2- oder 3-Achsen-Drehtische und Linearschienen
- Einfaches Modellieren und Synchronisieren zusätzlicher Achsen
2. Definieren Sie Ihr Werkzeug
Laden Sie ein 3D-Modell Ihres Werkzeugs und wandeln Sie es, durch Drag-and-Drop auf den Roboter, in ein Roboterwerkzeug um (unterstützte Formate: STL, STEP und IGES).
- Sie können das Werkzeug einfach anklicken und ziehen, um einen schnellen Konzeptnachweis (Proof of Concept) zu erhalten
- Sie können die Werkzeugkoordinaten (TCP) manuell eingeben, wie Sie diese in Ihrer Robotersteuerung sehen
- Kalibrieren Sie fehlerfrei Ihre Roboterwerkzeuge mit RoboDK
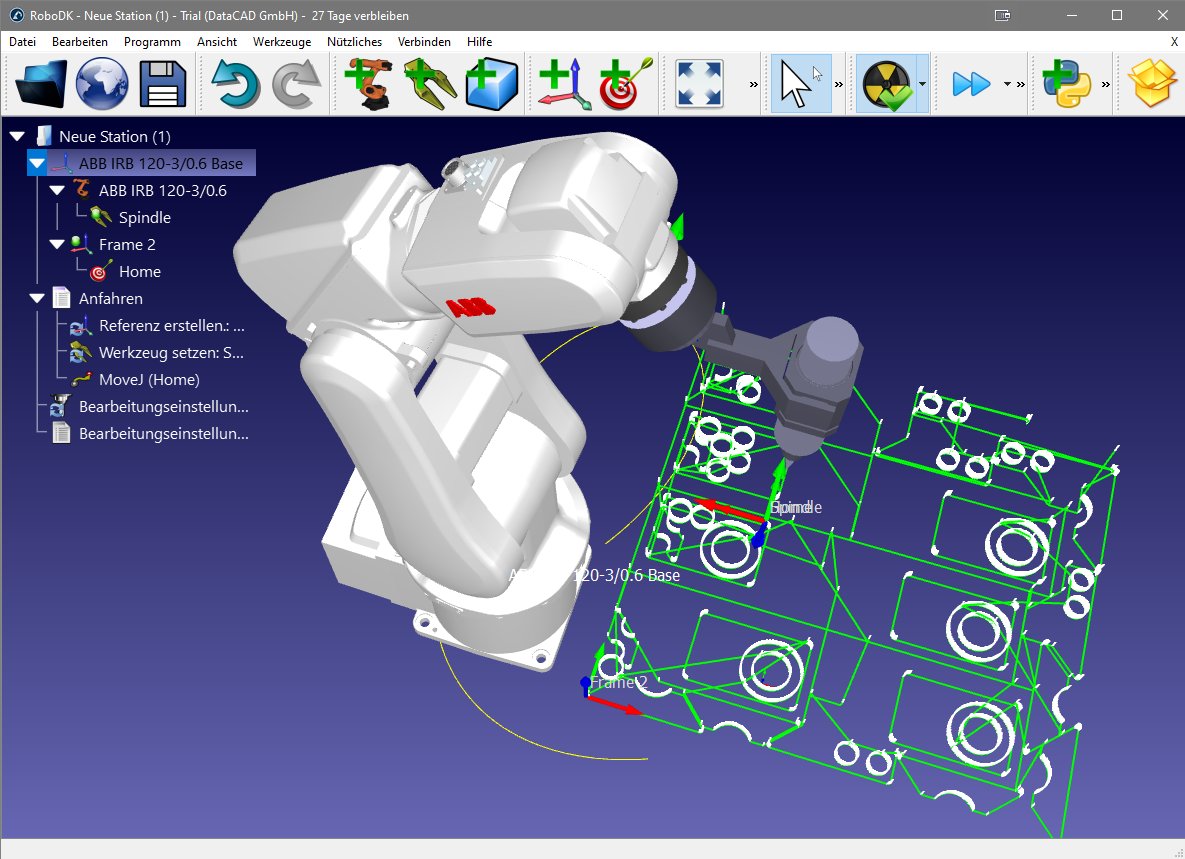
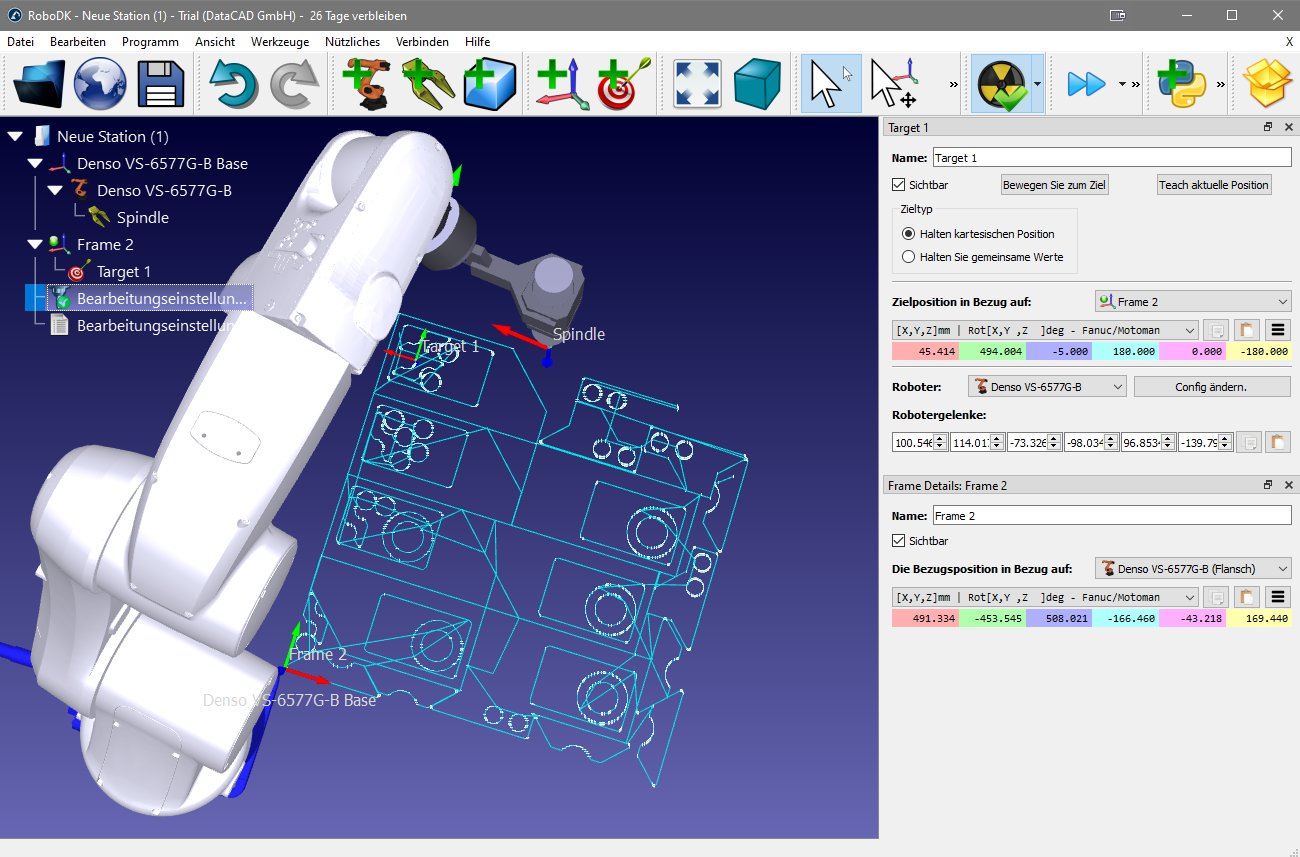
3. Laden Sie Ihr 3D-Modell
Importieren Sie das 3D-Modell Ihres Bauteils
- Platzieren Sie Ihr 3D-Modell in einem Referenzrahmen
- Klicken und ziehen Sie einfach Ihren Referenzrahmen (auch als Roboterkoordinatensystem oder Bezugspunkt bekannt), um einen schnellen Machbarkeitsnachweis zu erhalten
- Sie können die Koordinaten manuell eingeben, wie Sie diese in Ihrer Robotersteuerung sehen
- Lokalisieren Sie exakt das Teil offline und erstellen Sie Ihren digitalen Doppelgänger.
4. Simulieren Sie Ihren Werkzeugweg
Erstellen Sie einen Werkzeugweg mithilfe der RoboDK intuitiven benutzerfreundliche Bedienoberfläche:
- Programmieren Sie Ihre Roboter wie CNC-Maschinen! Importieren Sie NC-Programme sowohl im APT-Format, als auch G-Code Dateien für die Roboterbearbeitung
- Leichte Integration mit CAD/CAM-Software
- Zugriff auf Plug-ins für SolidWorks, Mastercam, Fusion 360, Rhino, Alphacam, WorkNC und TopSolid
- Generieren Sie automatisch fehlerfreie Werkzeugwege
- Automatische Vermeidung von Singularitäten, Achsenbegrenzungen und Kollisionen
5. Erzeugen Sie Roboterprogramme
Erzeugen Sie Roboterprogramme offline mit nur 2 Klicks:
- Mehr als 70 Postprozessoren zur Unterstützung von über 50 Roboterherstellern, darunter ABB, KUKA, Fanuc, Yaskawa/Motoman, Universal Robots und mehr!
- Keinerlei Programmierkenntnisse erforderlich
- Sie können ganz einfach den Programmablauf, über die intuitive Benutzeroberfläche von RoboDK, ändern
- Sie können automatisch lange Programme aufteilen, sodass sie in Ihre Robotersteuerung geladen werden können